INTRODUCTION学生紹介
- HOME
- support
- Student Introduction
- NODA TAKETO
STUDENT INTRODUCTION
Maritime Technology and Logistics
NODA TAKETO
Specializations:Information Systems Engineering
Main academic advisor:KONDO, Hayato
Mentor:FUKUDA, Gen / KAYANO, Jun
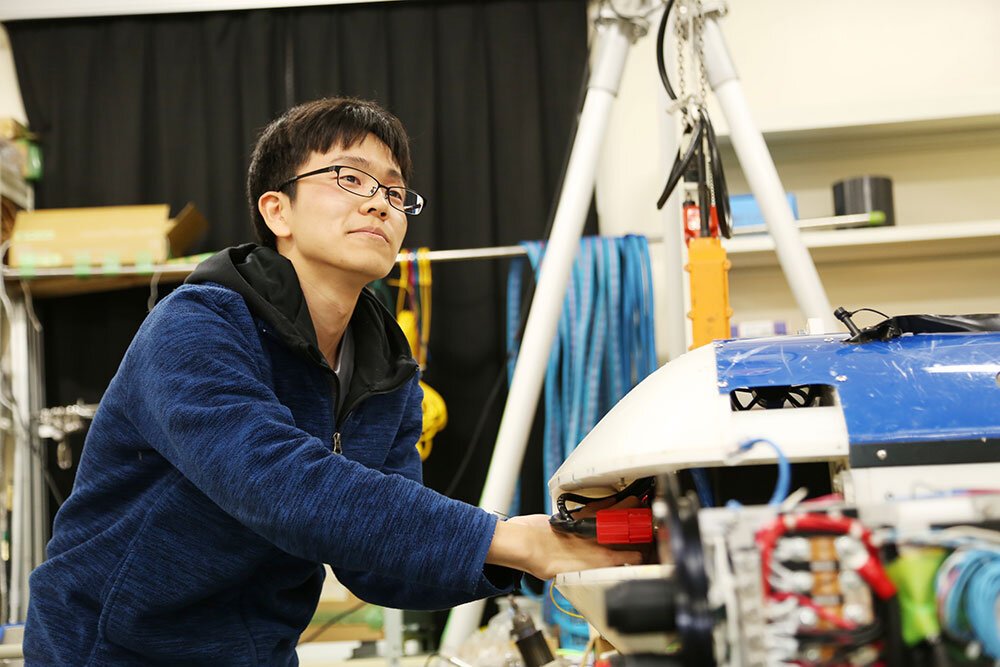
I am overjoyed when I see a robot moving based on a program I wrote
Using an autonomous underwater robot to automatically inspect underwater structures in the ocean
I enrolled at Tokyo University of Marine Science and Technology because I wanted to become a sailor, but when I was assigned to a seminar during my third year of undergraduate studies, I came across the research on underwater robots in the Kondo Laboratory to which I currently belong. I found their research very interesting and wanted to continue it further, so I went on to graduate school.
What I am developing is an autonomous robot that can operate underwater. The robot is not controlled by humans; it makes its own decisions based on data from its sensors. I also aim to equip the robot with a function that enables automatic inspections of bridge piers, breakwaters, and other underwater structures in the ocean.
Japan is surrounded by the ocean and many underwater structures. The blocks of breakwaters shift over long periods of time and must be checked regularly to ensure they are secured in place. Bridge piers must also be examined for damage.
This is typically done on inspections by divers, but as an island nation facing a labor shortage, there are too many areas that require inspections. We must also conduct inspections that focus on aspects of deterioration for the multitude of structures built 50 to 70 years ago, during Japan's period of high economic growth. More and more, we must conduct inspections and formulate plans for repairs. If we can automate the inspection process, it will reduce the problems of ensuring diver safety and work time, and allow for more frequent inspections.
The last decade has seen the emergence of inspection robots manually operated by humans, but my goal is to establish technology by which the robots move and conduct inspections automatically.
Seeking to incorporate AI into underwater robots that are almost ready for real-world action
 Underwater robots decide how to move based on data from onboard sensors, which can be incorrect or absent. These robots require onboard systems for processing data so that they can function properly even when the data is inaccurate or incomplete. In my experiments, around three times a year, I put my robot in the ocean to gather data, which I analyze and use to create filters to feed back to the robot to increase its level of performance.
Underwater robots decide how to move based on data from onboard sensors, which can be incorrect or absent. These robots require onboard systems for processing data so that they can function properly even when the data is inaccurate or incomplete. In my experiments, around three times a year, I put my robot in the ocean to gather data, which I analyze and use to create filters to feed back to the robot to increase its level of performance.
I started this research last year, and it was very difficult just to build the robot. In the experiments, I need to figure out what kinds of systems I should use. Since there are no correct answers, it is a continuous process of trial-and-error, and even after several rounds, I ultimately cannot conduct the experiments without a properly functioning robot. Making the robot was a struggle, but it was also very rewarding and gave me a sense of accomplishment when it actually worked in the ocean.
I am now in the process of examining how to incorporate AI as one of the robot's onboard technologies. I am gaining knowledge in WISE Program classes and trying to determine where and how AI can be applied.
At this stage, I am focusing on creating software for the robot and feel that it will soon be ready for real-world action.
WISE Program classes leave me with a palpable sense that I am gaining knowledge
Sometimes I stay at the school overnight before experiments or during busy times, but otherwise I come to school at around 10 a.m. to attend WISE Program classes. When I am not in class, I write programs in the lab and maintain the robot. I return home around 8 p.m.
The WISE Program has three or four classes per week. The main classes are on AI, and I find them all deeply interesting, in part because of my own interests. The curriculum is well organized, and I feel that the class content is fulfilling.
Classes are centered more on exercises than on listening to the professors. The data we use for AI-based learning is prepared by the professors. There are templates for programs to run, but you can also use your creativity and ingenuity to write your own programs. We then present the results of the exercises to the rest of the class. Having an environment where I can try things out on my own makes me feel like I am building a solid stockpile of knowledge. I also occasionally add the programs I made in class to my robot to see what happens.
The mentor system is another appealing feature of the WISE Program. Usually, if you don't understand something, you go to your own academic advisor. With the mentor system, however, we have other technical mentors to turn to. The system is designed so that we can contact professors who are doing research similar to our own on AI to ask them questions. I have not used the system yet, but I will probably seek advice from a mentor in the future. I am grateful that we can communicate directly with professors.
Continuing to study robots to increase their presence in our daily lives
The greatest thing about my experiments is writing programs and seeing the robot in action. I am overjoyed when I see a robot moving based on a program I wrote. I haven't decided exactly what I want to do in the future, but I hope to work in research involving robots. Whether they are underwater robots or robots on land, I want to make things that move. I will continue to learn many things through trial-and-error.