Overview
To improve the safety of ship operations, Marine Technology provides education and research on the ship motion prediction in waves, ship maneuverability analysis and innovative maneuvering methods, statistical ship operation management, safe ship operations based on man-machine systems analysis, ocean environment prediction, precise positioning by GPS, etc., and ship automatic control. Education and research on design, operation and management for the new marine structures such as mega-float as well as management techniques to coordinate maritime societies are also provided.
Lecture Methods
Lecture will be conducted using an engineering approach through experiments using a ship operation performance test tank and a circulating water tank, experiments using a ship operation simulator, and experiments and measurements using the training ship Shioji Maru.
Attractiveness
The appeal of the Marine Technology program is that the results obtained from the analysis of numerical data by computer can be experienced through experiments and simulations. This program aims to contribute to the technological development of marine science and technology, shipbuilding engineering, marine environmental engineering, marine development engineering, marine measurement technology, and safe navigation management engineering.
Staff
| Instructor | Title | Research Area | Course Title | |
|---|---|---|---|---|
| Atsushi ISHIBASHI | Associate professor | Human Factors, Maritime Techniques, Development of Support System for Safe Navigation, Research on Prediction of Ship Manoeuvrability | Design on Ship-handling System | |
| Akiko UCHINO | Professor | Human-Machine System, Human Factors, Workload, Characteristics Analysis of Seafarers‘ Behavior | Design on Ship-handling System | |
| Tadatsugi OKAZAKI | Professor | Guidance and Control, Probabilistic Safety Analysis | Ship Maneuvering System Enginnering, Exercise in Machine Learning |
|
| Nobuaki KUDO | Professor | Positioning software development, Multipath Mitigation, Application using GNSS, Low Earth Orbit | Global Navigation Satellite System Mobile Communication System |
|
| Yutaro SASAHARA | Assistant Professor | Wave energy conveter, CFD, Particle method, Ship motion measurement. | International Safety Management at Sea | |
| Naoyuki TAKAGI | Professor | Maritime English | Advanced Maritime English | |
| Gen FUKUDA | Associate Professor | Position estimation of the Ship, Ship position estimation without GNSS, Maritime traffic analysis | Inertial Sensors and Systems Theory | |
| Mitsuhiro MASUDA | Associate Professor | Ocean Space Utilization, Ocean Architectural Engineering, Damage Prediction and Disaster Prevention Measures for Marine Disasters, Water-related Disasters, and Marine Accidents | Propulsive Dynamics of Floating Body | |
| Kiyokazu MINAMI | Professor | Ship Engineering (Naval Architecture), Numerical Hydrodynamics, Ship Hull Conditioning Management, Sea Keeping Performance, Safety of Management at Sea, Sea Environment Management | International Safety Management at Sea Experiment of international Safety Management at Sea |
Selected Research Topics
Ship Maneuvering Systems Engineering Lab. (Prof. Okazaki)
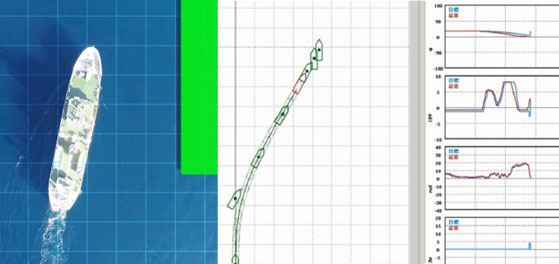
The goal of our research is to construct a human-centered ship maneuvering system. Pilots, who specialize in maneuvering ships, operate ships efficiently and safely in case of trouble. We are developing a system that automatically guides a ship by deriving an efficient maneuvering method with an appropriate safety margin from the ship's motion model.
Information and Communication Engineering Lab. (Prof. Kubo)
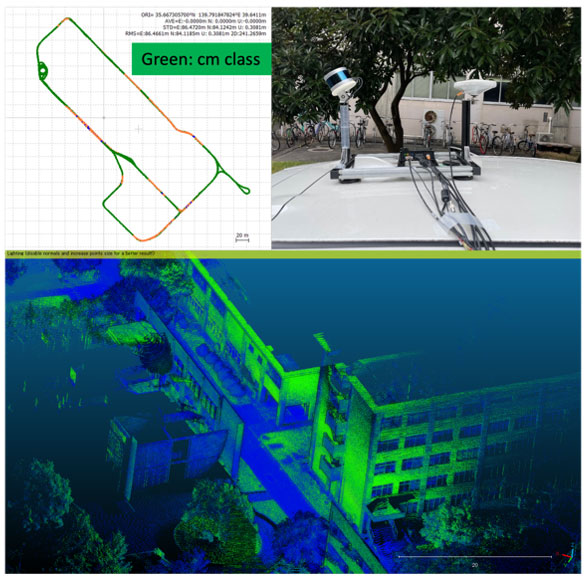
High-precision 3D map generation by GNSS/IMU/velocity sensor + LidarOur research and development is mainly focused on cm-class high-precision positioning using satellite positioning technology. Although convenience has been pursued in this field up to now, it is strongly expected to be used in highly reliable and safe applications such as automated driving in the future. For this purpose, we are studying not only satellite positioning technology but also integration technology with other sensors such as IMU (Inertial Navigation Unit), Lidar, and cameras. We are also considering the use of low earth orbit satellites, which are being launched at an accelerating pace in recent years, for positioning. Satellite positioning has the disadvantage of being vulnerable to interference and deception signals. Research and development of location authentication technology and countermeasures against interference and deception signals will also be an important theme.
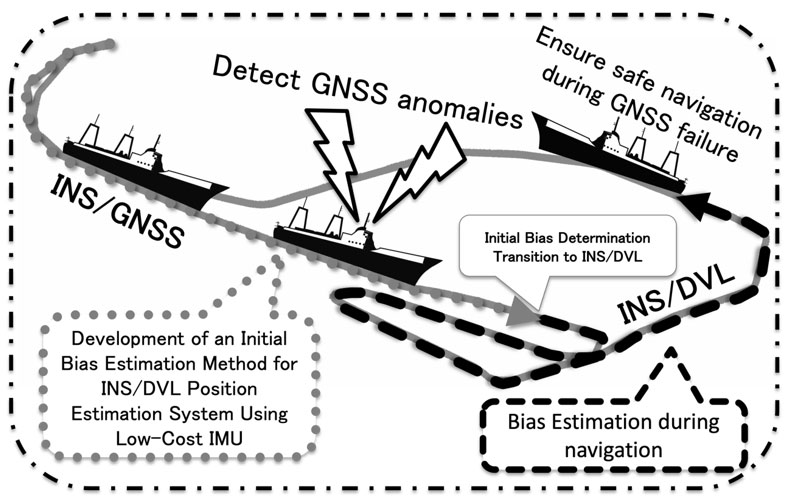
Position Estimation in case of GNSS Anomaly on Ships (ASSOC Fukuda)
-
There are several methods for general shipboard position estimation, including cross-bearing rigs, celestial navigation, dead reckoning, and GNSS, but only GNSS is capable of automatically estimating position and transmitting position signals to navigation instruments. However, the vulnerability of GNSS signals has long been pointed out, and attacks on vessels by jamming and spoofing have been confirmed. We are researching technologies that can continue position estimation and safe navigation in the event of some abnormality in GNSS.