| 研究テーマ:詳細は
http://www2.kaiyodai.ac.jp/~kifune/ |
 |
(1) |
船舶用ハイブリッド推進システムの燃料消費に関する研究 |
|
大型の外航船は推進力を得るために膨大な燃料を消費しており、1日に100トン以上の燃料を消費することも珍しくありません。このため、燃料消費を抑制するための様々な技術が
開発されています。電気推進あるいはハイブリッド推進を採用することも解決策の1つとなり得ます。
ところで、自動車とは異なり、船舶は極めて大型であるため、開発試験用の船舶を建造することは現実的ではありません。そこで、私たちの研究チームでは、推進システムの最適化を
目的とした燃料消費シミュレーションを開発しています。このシミュレーションはハイブリッド推進方式のみならず、従来型推進システムの燃料消費特性も計算することができます。
私たちはこのシミュレーションを用いて様々な推進システムの可能性について研究しています。 |
|
(1) |
Hybrid propulsion system for saving fuel oil |
|
Ocean going large cargo vessels consume huge amount of fuel oil to obtain propulsion power. The fuel oil which is consumed in large vessel often reaches
100 ton/day or more. Therefore, various technologies has been developed to save fuel in globe. Diesel electric propulsion system and hybrid propulsion system are
attractive solutions for these issue.
By the way, the vessel is extremely huge compared with car. So it is impossible to build the vessel for development and evaluation. Thus our research team have
developed a FOC (Fuel Oil Consumption) simulation for optimizing the propulsion system. This simulation can calculate the FOC characteristics in not only the hybrid
system but also conventional system. We have researched various propulsion system for vessel by using the simulation. |
|
 |
|
|
a) |
ハイブリッドタグボート |
|
タグボートは大型船の安全な出入港をサポートすることを目的とした特殊作業船です。船体は小さくても大出力のエンジンを搭載しています。また、タグボートは他の貨物船とは異なり、
その出力が頻繁に変化します。この特徴から、タグボートにハイブリッド推進システムを適用することは燃料消費量削減という観点からは有効です。既に日本を含む様々な地域で
ハイブリッド推進システムのタグボートが就航しています。私たちはエネルギーの流れを最適化することで燃料消費を抑制する方法について研究しています。 |
|
a) |
Hybrid tugboat |
|
Tugboat has a special purpose to support for berthing of the large vessels. Its hull size is small but two or three high power engines are equipped in general.
Additionally, its output power tends to fluctuate from low to high frequently unlike other cargo vessels. Focusing on these characteristics, the hybrid propulsion
system comes to be effective solution for saving fuel oil consumption. Actually, several hybrid tugboats have been already entered in service. Our research focus on
energy flow in the hybrid propulsion system. |
|
 |
|
|
b) |
調査船 |
|
海洋資源の開発が活発になっています。このため高性能な海洋調査船が複数建造されています。これらの船はDPS等の高度で特殊な操船を実現するため、推進システムを構成する機器は
オーバースペックになることがあります。これらの船において、燃料消費を節減するためには、エネルギーフローを最適化することは有効です。 |
|
b) |
Research vessel |
|
Many projects of developing ocean resources have been launched and planned in decade. Several oceanographic research vessel, anchor handler, and supply vessel have
been built for these projects. The propulsion system of these vessels often consists of high spec apparatus to realize DPS operation. Just in case, it is not uncommon
that these apparatuses such as prime mover are designed large more than necessity. In consequence, it is effective to optimize the energy flow for saving fuel. |
|
 |
|
|
(2) |
水中ロボット向け非接触給電システムの開発 |
|
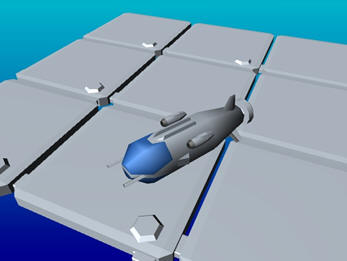
海洋調査や資源開発の現場では、様々な水中ロボットが利用されています。水中ロボットは主にROVとAUVに分類されます。ROVは船上のコンピュータと有線接続されており、船上の
オペレータによって細かな作業を実施するのに適しています。一方、AUVは予め設定された海中経路を自動航行します。ワイヤレスであるため、広い範囲の海中を調査することができる
のが特徴です。こうした水中ロボットは搭載する電池電力で動作しています。この電池を水中で充電する非接触給電技術の研究が進められています。
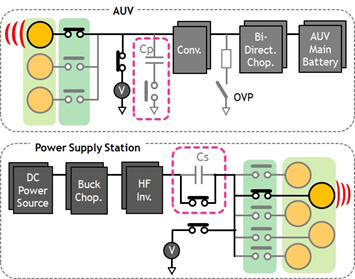
非接触給電技術に関する多くの研究は、電力伝送効率を高めることに注力しています。しかし私たちの研究チームでは、水中では効率だけでなく確実性がより重要だと考えています。
このため送受電システムに高い冗長性を持たせるための様々な研究課題に取り組んでいます。 |
|
(2) |
Development of contactless
power transferring system for underwater robot |
|
Various underwater robots are utilized for oceanographic research and marine resource development. The underwater robot is mainly categorized ROV (Remote
Operated Vehicle) and AUV (Autonomous Underwater Vehicle). ROV is wired to onboard computers in ship. Onboard operator control ROV’s thruster and manipulators
in order to implement missions. On the other hand, AUV can go and follow given course by itself without any operator’s orders. It has characteristics that broad
underwater area can be covered and researched because of wireless. Of course, these underwater vehicles operate on battery power. Wireless electric power transferring
technologies has been researched to charge these robot’s batteries at underwater condition.
The research on the wireless electric power transferring focuses on improving efficiency of power transferring. It is no doubt that high efficiency is
preferable. However we believe that certainty of power transferring is inevitable for underwater robots. Thus we challenge to realize that the power transferring
system has redundancy. |
|
 |
|
|
a) |
送受コイルと受電コイル |
|
私たちが想定している非接触給電システムには複数の送電コイルと受電コイルがあります。送電コイルと受電コイルのレイアウトを最適化することは送受電の確実性を高めることと、
送受電効率を改善することに対して効果的です。私たちはシミュレーションに頼ること無く、実際のレイアウトを模擬した実験装置を使ってレイアウトの最適化について研究しています。 |
|
a) |
Transferring and receiving coil |
|
The wireless electric power transferring system we’ve proposed has several coils in both side of transferring and receiving. Optimizing layout of both transferring
coils and receiving coils is effective to realize not only high efficiency but also high redundancy. Our group carry out a project to optimize layout of these coils by
using not a computer simulation but an experimental prototype. |
|
 |
|
|
b) |
整合と通信 |
|
送電コイルと受電コイルの最適なペアを見つけることはシステムの確実性を得る上で不可欠です。この要求を満足するために、独自の通信制御方式を研究しています。 |
|
b) |
Matching and communication |
|
It is inevitable to find an optimal pair of transferring coil and receiving coil for making system’s operation sure. To satisfy this requirement, we
challenge to provide original wireless communication protocol and control method. |
|
 |
|
