| Research topics: For more information visit:
http://www2.kaiyodai.ac.jp/~kifune/ |
 |
(1) |
Hybrid propulsion system for saving fuel oil |
|
Ocean going large cargo vessels consume huge amount of fuel oil to obtain propulsion power. The fuel oil which is consumed in large vessel often reaches
100 ton/day or more. Therefore, various technologies has been developed to save fuel in globe. Diesel electric propulsion system and hybrid propulsion system are
attractive solutions for these issue.
By the way, the vessel is extremely huge compared with car. So it is impossible to build the vessel for development and evaluation. Thus our research team have
developed a FOC (Fuel Oil Consumption) simulation for optimizing the propulsion system. This simulation can calculate the FOC characteristics in not only the hybrid
system but also conventional system. We have researched various propulsion system for vessel by using the simulation. |
|
 |
|
|
a) |
Hybrid tugboat |
|
Tugboat has a special purpose to support for berthing of the large vessels. Its hull size is small but two or three high power engines are equipped in general.
Additionally, its output power tends to fluctuate from low to high frequently unlike other cargo vessels. Focusing on these characteristics, the hybrid propulsion
system comes to be effective solution for saving fuel oil consumption. Actually, several hybrid tugboats have been already entered in service. Our research focus on
energy flow in the hybrid propulsion system. |
|
 |
|
|
b) |
Research vessel |
|
Many projects of developing ocean resources have been launched and planned in decade. Several oceanographic research vessel, anchor handler, and supply vessel have
been built for these projects. The propulsion system of these vessels often consists of high spec apparatus to realize DPS operation. Just in case, it is not uncommon
that these apparatuses such as prime mover are designed large more than necessity. In consequence, it is effective to optimize the energy flow for saving fuel. |
|
 |
|
|
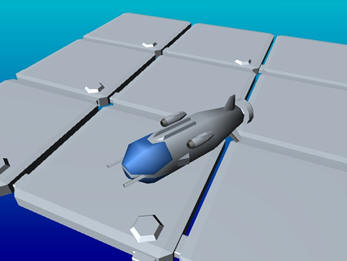
(2) |
Development of contactless
power transferring system for underwater robot |
|
Various underwater robots are utilized for oceanographic research and marine resource development. The underwater robot is mainly categorized ROV (Remote
Operated Vehicle) and AUV (Autonomous Underwater Vehicle). ROV is wired to onboard computers in ship. Onboard operator control ROV’s thruster and manipulators
in order to implement missions. On the other hand, AUV can go and follow given course by itself without any operator’s orders. It has characteristics that broad
underwater area can be covered and researched because of wireless. Of course, these underwater vehicles operate on battery power. Wireless electric power transferring
technologies has been researched to charge these robot’s batteries at underwater condition.
The research on the wireless electric power transferring focuses on improving efficiency of power transferring. It is no doubt that high efficiency is
preferable. However we believe that certainty of power transferring is inevitable for underwater robots. Thus we challenge to realize that the power transferring
system has redundancy. |
|
 |
|
|
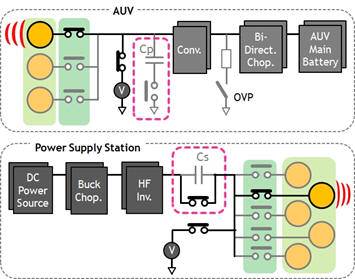
a) |
Transferring and receiving coil |
|
The wireless electric power transferring system we’ve proposed has several coils in both side of transferring and receiving. Optimizing layout of both transferring
coils and receiving coils is effective to realize not only high efficiency but also high redundancy. Our group carry out a project to optimize layout of these coils by
using not a computer simulation but an experimental prototype. |
|
 |
|
|
b) |
Matching and communication |
|
It is inevitable to find an optimal pair of transferring coil and receiving coil for making system’s operation sure. To satisfy this requirement, we
challenge to provide original wireless communication protocol and control method. |
|
 |
|

